LinearSolver< T > Class Template Reference
#include <LinearSolver.H>
Detailed Description
template<class T>
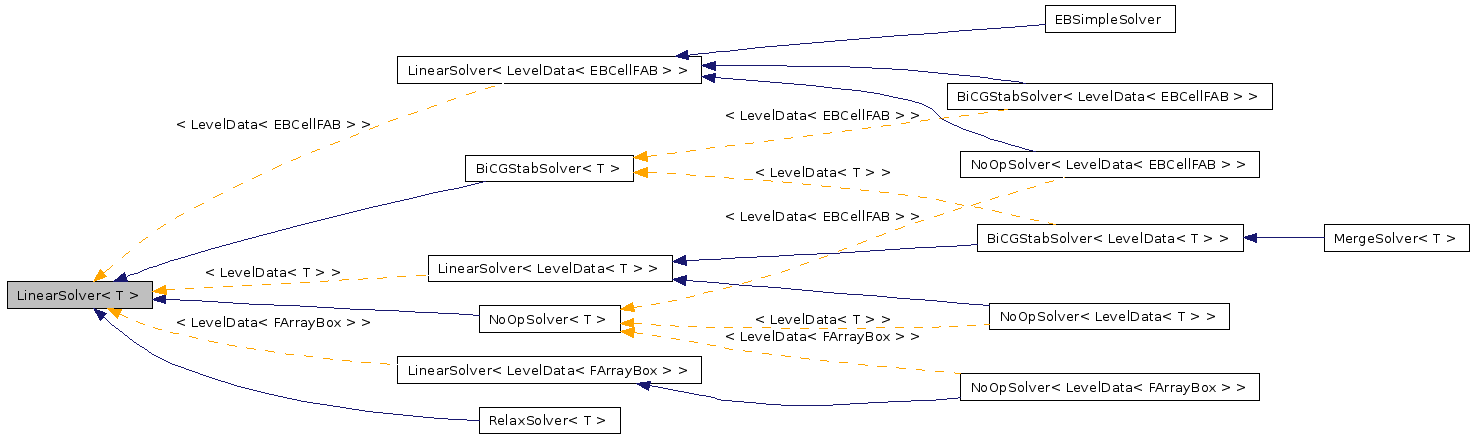
class LinearSolver< T >
Generic linear solver template. BiCGStab and others are built on top of this. Public Member Functions | |
| virtual | ~LinearSolver () |
| virtual void | setHomogeneous (bool a_homogeneous)=0 |
| virtual void | define (LinearOp< T > *a_operator, bool a_homogeneous=false)=0 |
| virtual void | solve (T &a_phi, const T &a_rhs)=0 |
| virtual void | setConvergenceMetrics (Real a_metric, Real a_tolerance) |
| Set a convergence metric, along with solver tolerance, if desired. | |
Constructor & Destructor Documentation
| virtual LinearSolver< T >::~LinearSolver | ( | ) | [inline, virtual] |
Member Function Documentation
| virtual void LinearSolver< T >::setHomogeneous | ( | bool | a_homogeneous | ) | [pure virtual] |
reset whether the solver is homogeneous.
Implemented in BiCGStabSolver< T >, MergeSolver< T >, NoOpSolver< T >, RelaxSolver< T >, EBSimpleSolver, BiCGStabSolver< LevelData< EBCellFAB > >, BiCGStabSolver< LevelData< T > >, NoOpSolver< LevelData< EBCellFAB > >, NoOpSolver< LevelData< FArrayBox > >, and NoOpSolver< LevelData< T > >.
| virtual void LinearSolver< T >::define | ( | LinearOp< T > * | a_operator, | |
| bool | a_homogeneous = false | |||
| ) | [pure virtual] |
Define the operator and whether it is a homogeneous solver or not. The LinearSolver does not take over ownership of this a_operator object. It does not call delete on it when the LinearSolver is deleted. It is meant to be like a late-binding reference. If you created a_operator with new, you should call delete on it after LinearSolver is deleted if you want to avoid memory leaks.
Implemented in BiCGStabSolver< T >, MergeSolver< T >, NoOpSolver< T >, RelaxSolver< T >, EBSimpleSolver, BiCGStabSolver< LevelData< EBCellFAB > >, BiCGStabSolver< LevelData< T > >, NoOpSolver< LevelData< EBCellFAB > >, NoOpSolver< LevelData< FArrayBox > >, and NoOpSolver< LevelData< T > >.
| virtual void LinearSolver< T >::solve | ( | T & | a_phi, | |
| const T & | a_rhs | |||
| ) | [pure virtual] |
Solve L(phi) = rhs (phi = L^-1 (rhs)).
Implemented in BiCGStabSolver< T >, MergeSolver< T >, NoOpSolver< T >, RelaxSolver< T >, EBSimpleSolver, BiCGStabSolver< LevelData< EBCellFAB > >, BiCGStabSolver< LevelData< T > >, NoOpSolver< LevelData< EBCellFAB > >, NoOpSolver< LevelData< FArrayBox > >, and NoOpSolver< LevelData< T > >.
| virtual void LinearSolver< T >::setConvergenceMetrics | ( | Real | a_metric, | |
| Real | a_tolerance | |||
| ) | [inline, virtual] |
Set a convergence metric, along with solver tolerance, if desired.
Default implementation does nothing, since there are probably cases (liked direct solves), where this has no real meaning.
Reimplemented in BiCGStabSolver< T >, MergeSolver< T >, NoOpSolver< T >, BiCGStabSolver< LevelData< EBCellFAB > >, BiCGStabSolver< LevelData< T > >, NoOpSolver< LevelData< EBCellFAB > >, NoOpSolver< LevelData< FArrayBox > >, and NoOpSolver< LevelData< T > >.
The documentation for this class was generated from the following file: